ellipse of uncertainty ตกลงว่าก้นหลุมมันอยู่ตรงไหนกันแน่ – นี่มันเรื่องอะไรกัน ต้องตลกบ้าๆแน่ๆ อุตส่าห์จ่ายเงินไปเป็นล้านๆเหรียญ แล้วยังต้องมาเจอปัญหาบ้าๆนี่อีกเหรอ
ตกลงว่าก้นหลุมมันอยู่ตรงไหนกันแน่ ….
มันจะไปยากอะไร
- ความยาวหลุมเราก็รู้ ก็วัดเอาจากก้านเจาะไง ที่เราเรียกว่า Measure Depth (MD)
- มุมเอียงจากแนวดิ่งของหลุม (inclination) เราก็วัดเอาจาก Accelerometer ก็ค่าแรงโน้มถ่วงของโลกไง ถ้า Accelerometer อ่านค่าได้เท่ากับค่า g ก็แปลว่าหลุมเราตรงๆดิ่ง ไม่เอียง ถ้าถ้าวัดได้น้อยก็แสดงว่าหลุมเอียง ๖หรือถ้าวัดได้ 0 ก็แปลว่าหลุมนอนราบขนานพื้นโลก) ส่วนจะเอียงเท่าไร ก็ไปใส่สูตรตรีโกณมิติเอาดิ (มันจะไปยากอะไร)
- ส่วนหลุมชี้ไปทางซ้ายทางขวา เราก็มี magnetometer มันก็คือเข็มทิศอิเลคทรอนิกส์ดีๆนี่เอง ในโทรศัพท์มือถือฉลาดๆของเราก็มี ไม่งั้นเราจะใช้ google map ได้ไง จริงไหม
คณิตศาสตร์เด็กม.ปลายง่ายๆ แค่ sine cos tan ธรรมดาๆ
ถ้าจะซื้อของใน shopee อยู่แล้ว เข้าทางนี้เลยครับ ผมจะได้ค่าคอมฯ ถือว่าช่วยผมจ่ายค่าเช่า host server ไม่ใช่คลิ๊กดูดเงินแน่นอนครับ ไม่ต้องกังวล

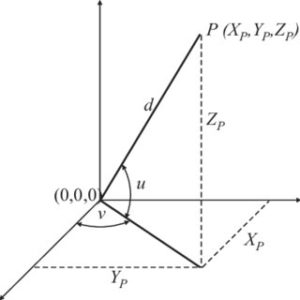
สมมุติว่า ปากหลุมอยู่ที่จุด 0
- เราเอาตลับเทป (measuring tape) วัดก้านเจาะทีล่ะก้านทีล่ะ stand เอาลงไปในหลุม จับมาบวกๆกัน เราก็จะได้ค่า d
- accelerometer ก็อ่านค่ามุม u มาให้เรา
- magnetometer ก็ให้ค่า v
ให้ลูกๆหลานๆที่เรียนตรีโกณมิติมา เด็กมันก็บอกได้ว่าก้นหลุม จุด p มันอยู่ที่ไหน
แล้วปัญหามันอยู่ตรงไหน (ว่ะ)
ellipse of uncertainty
ฝากขายที่หน่อย ค่าคอมฯ 3%
ขาย/ให้เช่า ที่ดิน 81 ตรว. มีน้ำ มีไฟ มีทะเบียนบ้าน มีโฉนด มีรั้วชั่วคราว ถมแล้ว ใกล้ตลาดพลูทรัพย์ ปทุม หน้ากว้าง 15 ม. ยาว 21 ม. (โดยประมาณ) ราคาโทรฯมาคุยกันครับ
แผนที่ รูปภาพ และ รายละเอียด ตามลิงค์นี้ครเบ
https://nongferndaddy.com/land-sales-81-wa-prathumthani/

ตกลงว่าก้นหลุมมันอยู่ตรงไหนกันแน่
อยากรู้ลึกรู้จริงก็ไปอ่านตามลิงค์นี้ก็แล้วกัน
แต่ถ้าขี้เกียจอ่านภาษาอังกฤษก็ตามผมมา จะเล่าแบบง่ายๆให้ฟัง
ทุกๆเครื่องมือวัด ไม่ว่าจะเบสิกสุดๆ เช่น ไม้บรรทัด มันก็มีค่าความคลาดเคลื่อน (error) ของการวัดนั้นๆอยู่แล้ว
ผมยกตัวอย่างเบสิกๆสุดๆ หาพื้นที่สี่เหลี่ยม กว้างคูณยาว นี่แหละ ถ้าผมใช้สายวัด วัดความกว้างได้ 2 เมตร +/- 0.1 เมตร วัดความยาวได้ 3 เมตร +/- 0.2 เมตร พื้นที่ผมก็จะอยู่ระหว่าง (2-0.1) x (3-0.2) ถึง (2+0.1)x(3+0.2) จริงไหม (ได้เท่าไรไปคำนวนเอง)
แล้วถ้ายุ่งกว่านี้ล่ะ
เช่น วัดความกว้างได้ 2 เมตร +0.1 แต่ -0.2 และ วัดความยาวได้ 3 เมตร +0.3 แต่ -0.1
คราวนี้ละมึน มันไม่สมมาตรนิหว่า แต่วิธีคิดเดียวกัน
… นี่แค่ คูณ กันธรรมดานะ ถ้ามีการใช้ sine cos tan ยกกำลัง ถอดราก log หรือ exponential function … ปรื้อ สุดจะคิดได้เลย
2 +/- 0.02 เมตรนั้น เป็นความคลาดเคลื่อนที่เราเรียกว่าเท่าๆกัน หรือ uniform error distribution
ไม่พลาด ข่าวสาร บทความ ความรู้ ประกาศตำแหน่งงานว่าง และ อื่นๆ
กรอก ชื่อ และ อีเมล์ ในแบบฟอร์มข้างล่าง จะมีอีเมล์กลับมาให้ "ยืนยัน" นะครับ การสมัครจึงจะสมบูรณ์ ... อ้อ ... อย่าลืมดูใน junk, trash, spam box นะครับ บางทีระบบมันเอาอีเมล์ตอบกลับไปไว้ที่นั่น
เช่น รูปข้างล่างนี่คือ 10 +/- 6 แปลว่า โอกาสที่จะเป็นอะไรก็ได้ตั้งแต่ 6 ถึง 16 เท่าๆกันเดี๊ยะ

ทีนี้ เครื่องวัดต่างๆ แต่ล่ะรุ่น แต่ล่ะหลักการ แต่ล่ะยี่ห้อ และ ผู้ผลิต ก็มี error distribution (การกระจายความผิดพลาด) ไม่เหมือนกัน ผมยกตัวอย่างข้างล่างก็แล้วกันว่ามีอะไรกันบ้างที่เห็นกันบ่อยๆ
แบบแรกก็ normal distribution ที่มีแบบตรงๆ หรือ เบ้ซ้าย หรือ ขวา แปลว่าง่ายๆว่า โอกาสที่ค่านั้นจะอยู่ตรงยอดๆกราฟน่ะมากที่สุด และจะมีโอกาสน้อยลงตรงปลายๆ ยิ่งปลายใกล้แกนนอนเท่าไร โอกาสเป็นค่านั้นยิ่งน้อย
ที่เห็นบ่อยอีกแบบก็ error ที่กระจายตัวแบบ poison distribution

กลับมาที่การวัดของเรา
- เอาตลับเทปวัด MD (Measure Depth)
- มุมเอียงจากแนวดิ่งของหลุม (inclination) เราก็วัดเอาจาก Accelerometer
- หลุมชี้ไปทางซ้ายทางขวาใช้ magnetometer
พอเรามีความรู้เรื่องการกระจายตัวของความคลาดเคลื่อนการวัดของเครื่องมือแล้ว ผมกลับมาถามว่าก้นหลุม จุด p ของเราในรูปข้างล่างนั่นมันอยู่ที่นั่นจริงๆ 555 🙂
ชักไม่ชัวร์แล้วใช่ไหมครับ …
จากที่เราแน่ใจว่า จุด p มันจะอยู่เป็นจุด เราก็คงมโนได้ว่า เอ … มันคงเป็นความน่าจะเป็นที่มันจะอยู่ในปริมาตรหนึ่งโดยที่มีความน่าจะเป็นสูงที่สุดอยู่ตรงไหนสักที่ในปริมาตรนั้น (ซึ่งไม่จำเป็นต้องอยู่ตรงกลางปริมาณนั่นเดี๊ยะ)

ขอบเขตของความไม่แน่นอน ตามทฤษฎี มันควรเป็นปริมาตรรูปทรงหนึ่งๆ ขึ้นกับการกระจายตัวของการวัดต้นทางที่เอามาคำนวน
ในกรณีหลุมเจาะของเรา การวัดความยาวหลุม (MD measure depth) ด้วยการวัดก้านเจาะด้วยตลับเทปนั้น ถือว่ามีความผิดพลาดต่ำ
อีกทั้งการวัดค่า g โดย Accelerometer เพื่อเอามาหามุมเอียงของหลุมนั้น ก็อาจจะพอมีบ้าง นอกจากนั้นยังมีความคลาดเคลื่อนที่แนวของเครื่องมือวัด ไม่ได้เป็นแนวเดียวกับแนวหลุมเดี๊ยะๆ
อารมณ์รูปข้างล่างนี่แหละ ผมวาดให้มันเว่อร์ๆ จะได้เห้นชัดๆ
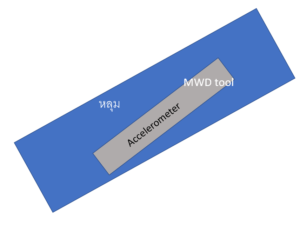
สรุป เอาเป็นว่า ทั้ง ตลับเทป และ accelerometer ให้ความผิดพลาดในแนวดิ่ง ซึ่งไม่มากเท่าไร ดังนั้น รูปทรงความคลาดเคลื่อนที่ตามทฤษฎีมันต้องเป็นปริมาตร ในทางปฏิบัติของงานของเรา มันจึงลดระดับลงมาเป็นพื้นที่แบนๆ
เราไม่ได้ต้องการรู้แค่ตำแหน่งก้นหลุม
เราต้องการรู้แนวของหลุมด้วยว่ามันเลื้อยไปซ้ายขวา ปาดไปปาดมา ไปปาดหลุมอื่นเขา ไปชนหลุมอื่น หรือ ไปดูดไฮโดรคาร์บอนจากแหล่งเดียวกับหลุมข้างเคียงหรือไม่ (ทำให้ความคุ้มในการขุดหลุมลดลง แทนที่จะไปดูดเอาจากแหล่งอื่น ดันไปดูดเอาจากแหล่งที่มีหลุมอื่นดูดอยู่แล้ว พูดง่ายๆคือ เอาหลอดจิ้มลงไปในแก้วใบเดียวกันแล้วแย่งกันดูด แทนที่จะไปดูดจากแก้วใบอื่น)
เราจะตอบคำถามข้างบนนั้นได้ เราจะต้องรู้แนวของหลุมโดยตลอด ไม่ใช่แค่ตำแหน่งปากหลุมกับก้นหลุม
วิธีที่เราทำก็คือ ซอยหลุมเป็นท่อนๆ แล้วค่อยๆหาตำแหน่งของหลุมไปทีล่ะจุดๆตลอดแนวหลุม เช่น วัดกันทุกๆ 10 เมตร หรือ 30 เมตรา ก็ว่าไป
เช่น ให้ p0 เป็นจุดปากหลุม
- จุด p1 = จุด p0 + 30 เมตร ก็ได้จุด p1 โดยใช้จุด p0 เป็นจุดอ้างอิง
- จุด p2 = จุด p1 + 30 เมตร ก็ได้จุด p2 โดยใช้จุด p1 เป็นจุดอ้างอิง
- จุด p3 = จุด p2 + 30 เมตร ก็ได้จุด p3 โดยใช้จุด p2 เป็นจุดอ้างอิง
- จุด p4 = จุด p3 + 30 เมตร ก็ได้จุด p4 โดยใช้จุด p3 เป็นจุดอ้างอิง
- ทำแบบนี้ไปเรื่อยๆ จนถึงก้นหลุม
ดูชิวๆนิ จะมีปัญหาอะไรอีก …
ชีวิตจริงมันเป็นอย่างนี้ครับ
ให้ e เป็นค่าความคลาดเคลื่อน
ให้ p0 + e0 เป็น ปากหลุม โดย e0 = 0 เพราะเรารู้ตำแหน่งปากหลุมแน่นอนนิ
- จุด p1 = จุด p0 + 30 เมตร ก็ได้จุด p1 + e1 โดยใช้จุด p0 เป็นจุดอ้างอิง (ได้ e1 แถมมา)
- จุด p2 = จุด p1 + 30 เมตร ก็ได้จุด p2 + e2 โดยใช้จุด p1 เป็นจุดอ้างอิง (ได้ e2 แถมมา)
- จุด p3 = จุด p2 + 30 เมตร ก็ได้จุด p3 + e3 โดยใช้จุด p2 เป็นจุดอ้างอิง (ได้ e3 แถมมา)
- จุด p4 = จุด p3 + 30 เมตร ก็ได้จุด p4 + e4 โดยใช้จุด p3 เป็นจุดอ้างอิง (ได้ e4 แถมมา)
- ทำแบบนี้ไปเรื่อยๆ จนถึงก้นหลุม
ดังนั้นเราจะเห็นว่า e0 < e1 < e2 < e3 < e4 …. < en
แปลว่าอะไๆรครับ … แปลว่า หลุมยิ่งลึก ยิ่งมีความไม่แน่นอนสูงที่จะไม่เจอก้นหลุมอย่างที่เราคิดเอาไว้
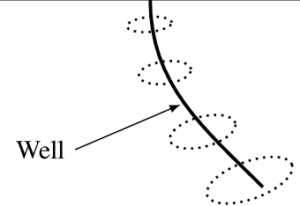
เห็นไหมครับ วงรีประๆจะขยายใหญ่ขึ้นๆ ไปทางก้นหลุม เพราะมันสะสมความไม่แน่นอนมาตลอดแนวหลุม
นี่ครับ ตามทฤษฎี ปริมาตรของความไม่แน่นอนต้องเป็นลูกแตงโมรีๆอ้วนๆแบบนี้
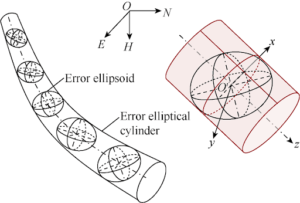
ยิ่งลึก ลูกแตงโมยิ่งใหญ่ขึ้น มีความไม่แน่นอนในแนวความยาวของหลุม และ แนวดิ่งของหลุมด้วย แต่เนื่องจากมันน้อยอย่างที่อธิบายไป มันจึงลดรูปเป็นแผ่นวงรีแบนๆ
จริงๆเราก็น่าจะจบกันตรงนี้ แต่ แหม … แถมหน่อยๆ
อยากขุดให้ชน หรือ อยากขุดไม่ให้ชน
โธ่ … แมวก็ตอบได้ ใครล่ะอยากจะขุดให้ชนกัน จริงไหมครับ
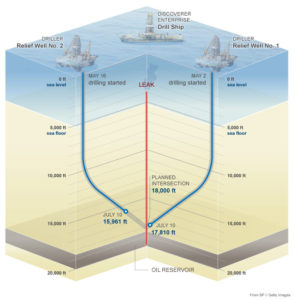
แต่จำ DeepWater Horizon ได้ไหม ที่เราต้องการขุดหลุมอีกหลุมให้ไปชนกับหลุมที่มีปัญหา เพื่อจัดการควบคุมหลุมที่มีปัญหานั้น
เราเรียกหลุมที่เราจะขุดไปเพื่อให้มันชนว่า relief well
เอาเถอะ ปกติ 99.99% เราไม่ต้องการให้มันชนกันหรอก ดังนั้น เราจึงมีการคำนวนระยะปลอดภัยที่เป็นมาตราฐานของอุตสาหกรรมเราอยู่ เหมือนการรักษาระยะห่างทางสังคมช่วง COVID-19 นี่แหละ
เราเรียกว่า Separation Factor (SF) ที่บอกว่าเราไม่ควรจะขุดให้หลุมเราอยู่ใกล้หลุมชาวบ้านเกินเท่าไร
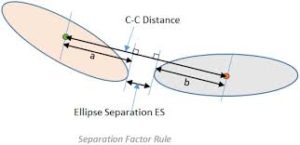
CC = center to center distance
SF = CC/(a+b) … ถ้า SF เท่ากับ 1 แปลว่า ขอบวงรีชนกันพอดี ก็คือ มีโอกาสที่หลุมจะสีกัน 555 🙂
แต่ล่ะบ.ก็มีนโยบายแต่ต่างกันไปว่า SF ไม่ควรต่ำกว่าเท่าไร ขึ้นกับเทคโนโลยีที่ใช้ใน MWD ยิ่งเทคโนโลยี MWD ดีๆ เช่น ใช้ gyro MWD แทน magnetometer ยิ่งทำให้ความคลาดเคลื่อนน้อยลง วงรีของความไม่แน่นอน (Ellipse of Uncertainty) ก็จะเล็กลงไปด้วย แปลว่าเราสามารถขุดหลุมได้ใกล้กันมากขึ้นโดยที่ไม่เสี่ยงจะชน
2 กติกา ลึก กับ ตื้น
เนื่องจาก magnetometer มันใช้หลักการแม่เหล็กโลก ดังนั้น อะไรที่มีความเป็นแม่เหล็กที่อยู่ใกล้ๆมัน ค่าที่มันอ่านได้ ก็จะคลาดเคลื่อนสูง เชื่อถือไม่ได้ ดังนั้น ตอนที่ MWD อยู่ในท่อกรุ(ที่ทำด้วยเหล็ก) magnetometer จะถูกความเป็นแม่เหล็กของท่อกรุรบกวน จนค่าที่อ่านได้ เพี้ยนไปหมด ซึ่งตอนนั้นเราก็ไม่จำเป็นล่ะ เพราะ BHA เรายังอยู่ในท่อกรุนิ จะไปชนกับใครล่ะ 555 🙂
ตอนออกจากท่อกรุมานี่ซิ มันจะมีระยะหนึ่งที่ยังมีอิทธิพลของแม่เหล็กจากท่อกรุ(ที่เพิ่งออกมา) หรือ จากท่อกรุของหลุมข้างเคียง ในกรณีที่ขุดจากแท่นหลุมเจาะ (WellHead Platform WHP) ที่ตอนต้นๆตื้นๆ ใต้ WHP จะมีท่อกรุยั่วเยี้ยไปหมด

พูดง่ายๆคือ ต้องขุดไปให้พ้นๆท่อกรุ (ทั้งท่อกรุหลุมตัวเอง และ หลุมข้างเคียง) ไปสักระยะ ถึงจะเชื่อ magnetometer ได้ล่ะ นั่นคือ SF ไม่มีความหมายจ้าในช่วงนี้
แล้วระหว่างนั้นล่ะ ตูจะเชื่ออะไร …
กติกาที่เรามักใช้ตอนที่ magnetometer ยังไม่พ้นอิทธิพลแม่เหล็กจากท่อกรุ คือ CC ครับ ค่า center to center ได้รับผลกระทบจากความเป็นแม่เหล็กท่อกรุน้อยกว่า (เพราะ CC ใช้ accelerometer เป็นหลักในการคำนวน) เราจึงมักมีกติกาว่าช่วงแรกให้ใช้ CC เป็นเกณฑ์ว่า ต้องไม่น้อยกว่าเท่านั้นเท่านี้
พอ magnetometer อ่านค่าที่เชื่อถือได้ เราก็ย้ายมาใช้ กติกา SF แทน
เหนื่อยแล้ว แค่นี้ดีกว่า มากกว่านี้คุณก็มาแย่งงานผมทำหมดพอดี 555
ถ้าจะซื้อของออนไลน์จาก 2 เจ้านี้อยู่แล้ว คลิ๊กลิงค์ หรือ โลโก้ ข้างล่างนี้เลยครับ ผมจะได้ค่าคอมฯเล็กๆน้อยๆสมทบทุนจ่ายค่าเช่า host server ขอบคุณครับ
(ไม่ต้องกังวลนะครับ ไม่ใช่ลิงค์ดูดเงินแน่ๆ)
 https://raka.is/r/qlzXR https://raka.is/r/qlzXR |
https://raka.is/r/gP7GV |
--- มีคำถามเพิ่มเติม พูดคุย เม้าส์มอย ไปต่อกันได้ที่กระดานสนทนา (webboard) นะครับ
คลิ๊กเลย
