


Magnetic ranging – จะขุดให้ชน หรือ ขุดให้ไม่ชน
นึกถึงจรวดที่ยิงไปสกัดจรวด แล้วก็อดนึกถึงงานของเราไม่ได้


เราก็มีเหมือนกันนะ ที่พยายามขุดหลุมหนึ่งให้ไปชนกับอีกหลุมหนึ่ง เข้าตำราตอนอยากจะหลบดันชน ตอนอยากจะชนกลับพลาดไม่ชน
ปกติเราไม่อยากขุดไปชนหลุมข้างๆหรอกครับ วิธีทั่วไปที่พอใช้งานในการป้องกันไม่ใช้ชน เราใช้วิธีวัดตำแหน่งของหลุมที่จุดต่างๆของหลุมที่เรากำลังขุด และ หลุมที่ไม่ต้องการจะไปชน
ตำแหน่งของหลุมที่จะขุด เราใช้ MWD (Measurement While Drilling) ใน MWD มีอุปกรณ์สำคัญ 2 ชิ้น Accelerometer วัดความเอียงของหลุม magnetometer วัดทิศทางเหนือใต้ออกตก มีความยาวก้านเจาะ วัดความยาวหลุม แล้วเอา 3 อย่างนี่มาคำนวนสูตรพื้นๆ Pythagoras นี่แหละ เราก็จะรู้ จุดต่างๆของหลุมขณะที่ขุด
MWD Measurement While Drilling BHA Bottom Hole Assemble
ตำแหน่งของหลุมที่เราจะหลบ เราก็เอาข้อมูล MWD เก่าของหลุมนั่นมากางดู เราก็ระวังอย่าไปชน
ทีนี้ปัญหามันอยู่ที่ การวัดมันมีความไม่แน่นอนเราบอกไม่ได้แป๊ะๆว่า หลุมเราอยู่ตรงไหนแน่ๆ หลุมที่จะหลบอยู่ตรงไหนแน่
ellipse of uncertainty ตกลงว่าก้นหลุมมันอยู่ตรงไหนกันแน่
https://nongferndaddy.com/ellipse-of-uncertainty/


ก็เลยต้องห่างเอาไว้ก่อน ก็ทำให้เราไม่สามารถใช้พื้นที่ได้อย่างเต็มที เพราะต้องเกร็ง ไม่ไปเฉียดมาก
Magnetic ranging
ทีนี้มันก็มีบางสถานการณ์ที่เราอยากจะขุดให้แป๊ะๆ เช่น กรณีแบบนี้
1-ขุดอ้อม fish เพื่อขุดต่อในแนวเดิม หรือ อ้อมซีเมนต์ที่สละหลุมไว้แล้ว เพื่อไปซ่อมส่วนล่างของหลุม (Go around obstruction)


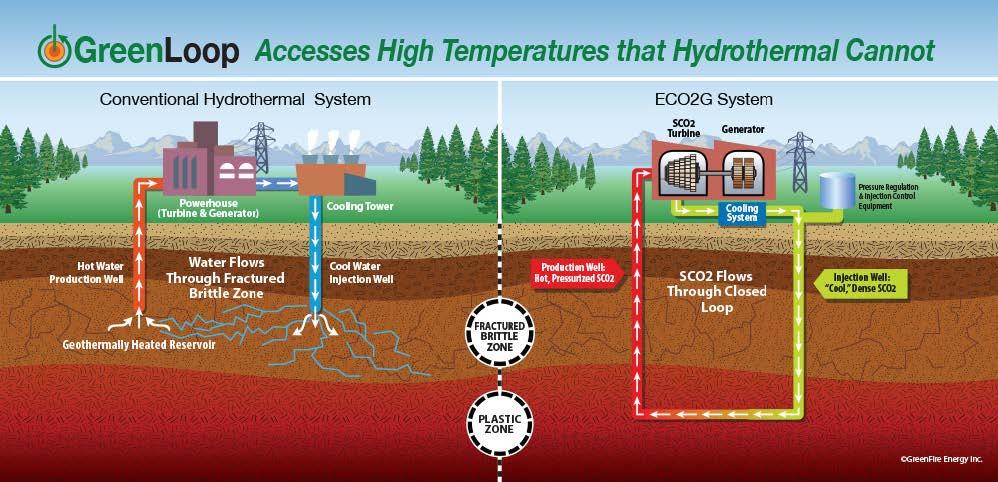
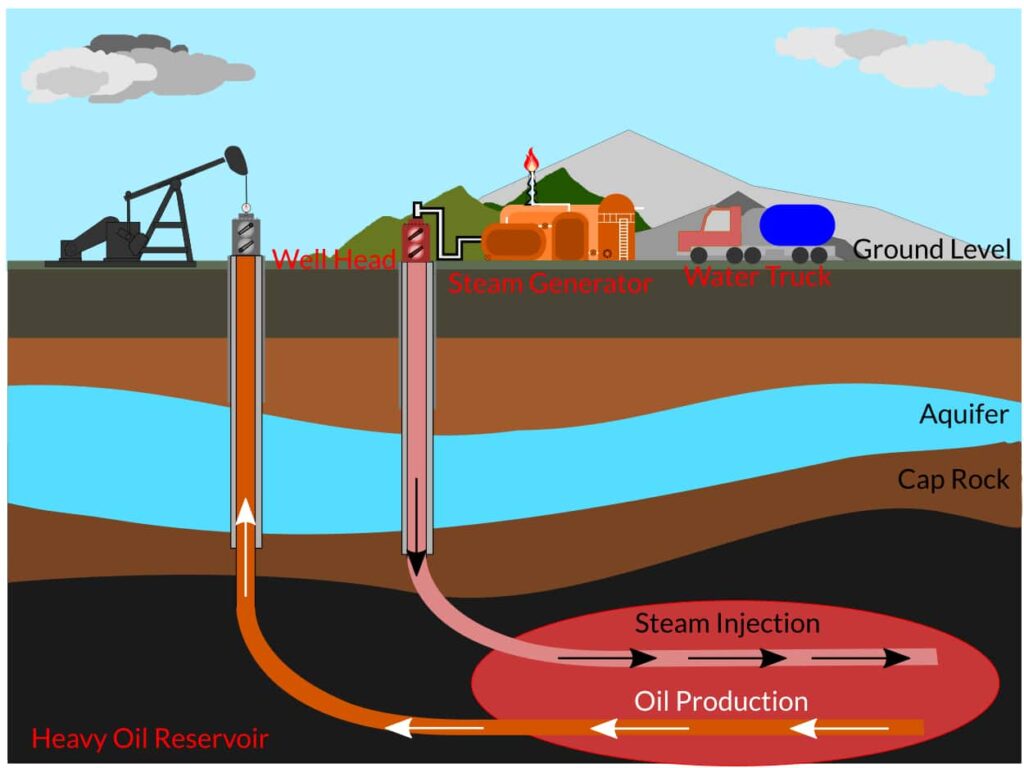
2-ขุดขนานในระยะที่ต้องการกับอีกหลุม เช่น หลุมนำความร้อนจากใต้ธรณีมาใช้ (Geothermal) หรือ หลุมที่ต้องใช้ไอน้ำลงไปละลายน้ำมันที่หนืดให้ไหลเข้ามาอีกหลุม
ข้างล่างนี้ก็หลุมความร้อน ขุดสองหลุม ให้ปลายหลุมมาชนกัน

ส่วนข้างล่างนี่ก็หลุมไอน้ำ ขุดหลุมหนึ่งให้ขนานไปอีกหลุมหนึ่ง
Steam-assisted gravity drainage (SAGD; “Sag-D”)

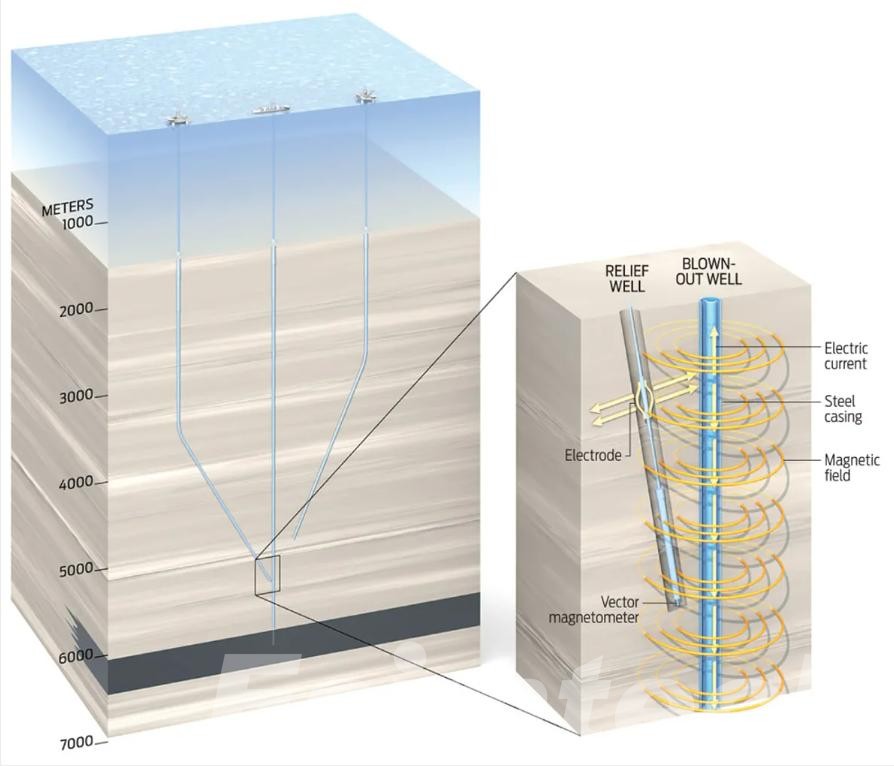
3-Relief well หลุมกู้ภัย คือ ขุดลงไปลดความดันหลุมที่กำลังประทุ (blow out) เช่น กรณี Deepwater Horizon ที่รู้จักกันดี

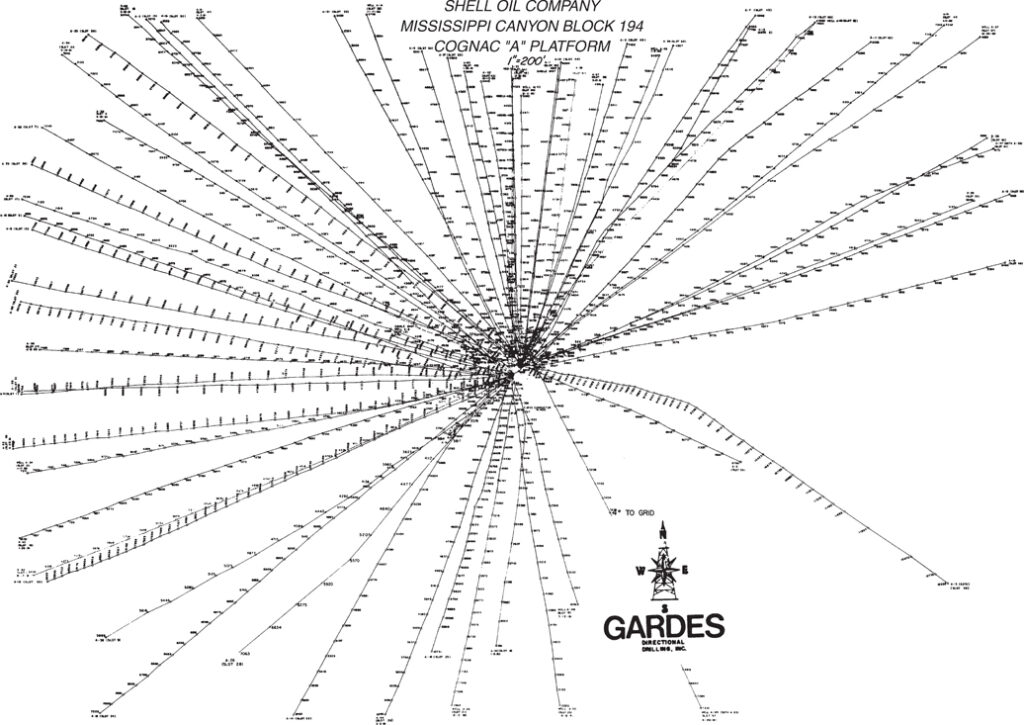
4-แท่นหลุมผลิต (WHP) ที่มีหลุมผลิตแยะๆ และ เบียดๆ จำเป็นต้องป่ายไปป่ายมา เป้าก็ใกล้ๆกัน
อย่างรูปข้างล่างนี่ ปวดตับพะยะค่ะ ขุดไงไม่ให้ชนว่ะ

กรณีเหล่านี้เราใช้ ellipse of uncertainty ไม่ได้แน่ๆ เพราะมันไม่แม่นยำหรอก
นี่ครับ พระเอกเรา … Magnetic ranging technology
เราใช้วิธีวัดสนามแม่เหล็กระหว่าง หลุมที่กำลังขุด และ หลุมเป้าหมายโดย ตัววัดอยู่ที่หลุมที่กำลังขุด และ แม่เหล็กอยู่ที่หลุมเป้าหมาย หรือ กลับกัน ตัววัดอยู่ที่หลุมเป้าหมาย และ แม่เหล็กอยู่ที่หลุมที่กำลังขุด
มีสองวิธีหลักๆ ขึ้นกับแม่เหล็กนั้นมาอย่างไร
Active Magnetic Ranging (AMR) – แม่เหล็กประดิษฐ์ หรือ แม่เหล็กชั่วคราว ก็เอาสายไฟพันแกนเหล็ก นั่นแหละ แม่เหล็กจะแรงมาก ตัววัดก็จะได้กลิ่นแต่มาแต่ไกล (long range) และ แม่นมาก
ส่วนจะเอาแม่เหล็กลงไปในหลุมที่กำลังขุด หรือ หลุม เป้าหมาย อย่างไร ไม่ยากเลยครับ เบสิกๆก็เอา wireline หย่อนลงไป ไม่ก็ส่งลงไปกับ BHA ใช้แบตเตอรี่ก็ได้ ใช้ turbine ปั่นไฟเอาก็ได้ ที่ไหนมีไฟฟ้าก็สร้างสนามแม่เหล็กได้หมดแหละ
ถ้าขี้เกียจก็เอาสายไฟต่อกับท่อกรุที่ปากหลุม ลงไฟฟ้าลงไปตามท่อกรุยังได้เลย
แต่ล่ะวิธีมีข้อดี ข้อจำกัด ต่างกัน ให้ผู้เชี่ยวชาญเขาเลือกใช้เหอะ เราเอาไอเดียกว้างๆไปก็พอ
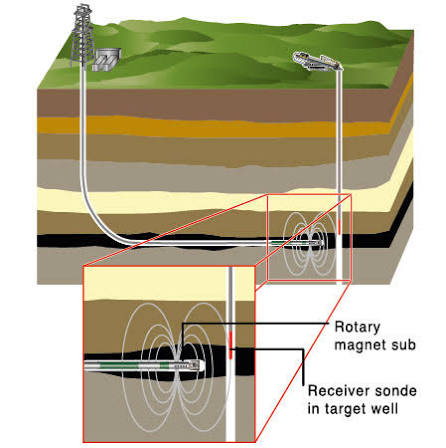
รูปข้างล่างนี่ก็เป็นเทคนิคหนึ่งในหลายๆเทคนิคที่ทำกัน หลุมที่ขุดสร้างสนามแม่เหล็กโดยการหมุนแม่เหล็ก(ที่กระตุ้นด้วยไฟฟ้า) ส่วนตัววัดอยู่ในหลุมเป้า (สีแดงๆในรูป)

Passive Magnetic Ranging (PMR) – อาศัยความเป็นแม่เหล็กธรรมชาติของท่อกรุ ที่เรียกว่าแม่เหล็กถาวร แรงแม่เหล็กมันก็น้อยๆเนอะ ตัววัดต้อเข้าไปใกล้ๆถึงจะได้กลิ่นแม่เหล็ก และ ก็ไม่ค่อยแม่น แน่นอนวง่า ถ้าเป็นหลุมเปิด (open hole) ไม่มี ท่อกรุ ก็นะ ไม่มีอะไรให้ส่งกลิ่น(แรงแม่เหล็ก) ตัววัดเก่งแค่ไหนก็หาไม่เจอ
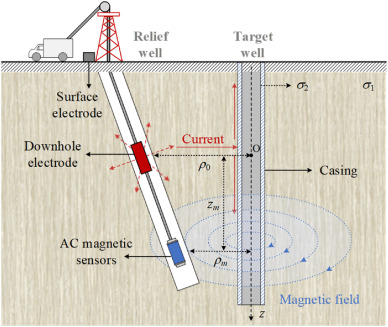
รูปข้างล่างนี่ก็เป็นเทคนิคหนึ่งในหลายๆเทคนิคที่ทำกัน ประยุกต์นิดหน่อย คือ ท่อกรุล้วนๆมันเป็นแม่เหล็กอ่อนๆ ต้องใช้ขั้วไฟฟ้า (electrode สีแดงๆในรูป) ปล่อยไฟฟ้าใส่มัน กระตุ้นมันหน่อย มันก็จะเป็นแม่เหล็กแรงขึ้น แล้วตัววัด (สีน้ำเงินในรูป) ก็จะวัดว่าตอนนี้ห่างเท่าไร ทิศทางไหน

เอาล่ะ หอมปากหอมคอเนอะ พอได้แนวๆคิดไปล่ะ ว่าเราจะขุดยังไงให้หลุมหนึ่งไปป๊ะกับอีกหลุมหนึ่งให้ได้ ไม่บ่อยหรอกที่เราต้องทำแบบนี้ แต่อย่างน้อยก็รู้ว่าถ้าต้องทำต้องทำอย่างไร
ผู้นำให้วงการนี้ก็มี Halliburton, Schulmberger และ Scienctific drilling